Navpoint Matrix
The vanilla navigation matrix is stored in ./navdata/matrix_int.dat.
The file format is defined as:
| 00 01 02 03 04 05 06 07 |
00000000 | Dist | Next | Dist |
00000008 | | Next | Dist |
0000000C | ... |
It is a square matrix of the navpoints, denoting the distance and path. Every cell holds the total distance between x and y, and the next navpoint's index required to go from x to y: \[M[x][y] = (dist_{xy}, next_{xy}) \] Consequently the main diagonal's distance is always 0: \[ x = y \implies dist_{xy} = dist_{yx} = 0 \land next_{xy} = next_{yx} = x = y \] Cells of directly connected navpoints point to the other cell: \[ next_{xy} = y \implies next_{yx} = x \] Cells of navpoints connected through only one other navpoint are symmetric: \[ next_{xz} = y \land next_{yz} = z \implies next_{zx} = y \land next_{yx} = x \]
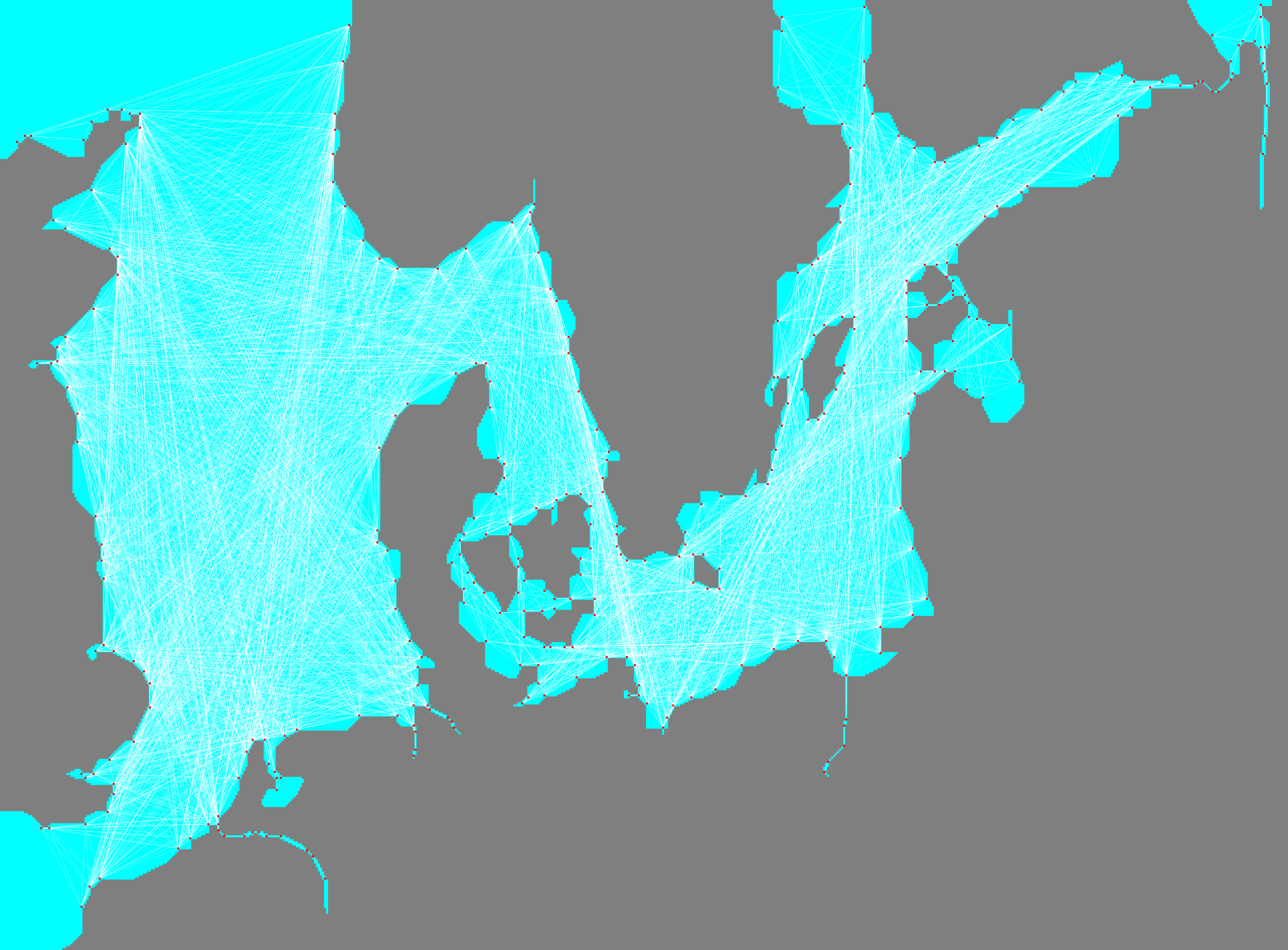
Given the distances of directly connected navpoints, the navpoint matrix can be calculated using pathfinding algorithms like A*.
The following sample code plots the direct connections:
import struct
from typing import Tuple
from PIL import Image, ImageDraw
UPSCALE = 11
# Load navigation matrix
nav_matrix_file = open("nav_matrix.dat", "rb")
width, height = struct.unpack("<HH", nav_matrix_file.read(4))
print(f"{width}x{height}")
image = Image.new("RGB", (width * UPSCALE, height * UPSCALE))
draw = ImageDraw.Draw(image)
navigation_matrix: dict[Tuple[int, int], Tuple[int, int, int]] = {}
for y in range(0, height):
for x in range(0, width):
cell = nav_matrix_file.read(1)
if cell == b"\x00":
navigation_matrix[(x, y)] = (0x00, 0xFF, 0xFF)
elif cell == b"\x01":
navigation_matrix[(x, y)] = (0x7F, 0x7F, 0x7F)
else:
raise Exception(f"{cell}")
# Load navigation vector
nav_vec_file = open("nav_vec.dat", "rb")
navpoints_count = struct.unpack("<H", nav_vec_file.read(2))[0]
print(f"{navpoints_count} navpoints")
nav_vec_file.read(2)
vector: list[Tuple[int, int]] = []
for i in range(0, navpoints_count):
x = struct.unpack("<H", nav_vec_file.read(2))[0]
y = struct.unpack("<H", nav_vec_file.read(2))[0]
vector.append((x, y))
# Draw navigation matrix
for (x, y), val in navigation_matrix.items():
for xi in range(0, UPSCALE):
for yi in range(0, UPSCALE):
image.putpixel((x * UPSCALE + xi, y * UPSCALE + yi), val)
# Load and draw navpoint matrix
matrix_int_file = open("matrix_int.dat", "rb")
direct_connections = 0
indirect_connections = 0
for source in range(0, navpoints_count):
for destination in range(0, navpoints_count):
total_distance = struct.unpack("<I", matrix_int_file.read(4))[0]
next_hop = struct.unpack("<H", matrix_int_file.read(2))[0]
if next_hop == destination:
x_src, y_src = vector[source]
x_dst, y_dst = vector[destination]
draw.line(
[
(x_src * UPSCALE + UPSCALE // 2, y_src * UPSCALE + UPSCALE // 2),
(x_dst * UPSCALE + UPSCALE // 2, y_dst * UPSCALE + UPSCALE // 2),
],
width=1,
)
direct_connections += 1
else:
indirect_connections += 1
print(
f"{direct_connections} direct connections, {indirect_connections} indirect connections"
)
# Draw navigation vector
for x, y in vector:
for xi in range(0, UPSCALE):
for yi in range(0, UPSCALE):
image.putpixel((x * UPSCALE + xi, y * UPSCALE + yi), (0xFF, 0x00, 0x00))
image.save("matrix_int.png", "PNG")